

สิงคโปร์เปิดตัวหุ่นยนต์หงส์ดูแลน้ำ
ทาง PUB ซึ่งเป็นหน่วยงานบริหารดูแลน้ำแห่งชาติสิงคโปร์ระบุเมื่อวันที่ 15 ม.ค.ว่า หุ่นยนต์หงส์ 5 ตัว จะถูกนำมาใช้ในอ่างเก็บน้ำหลายแห่งในสิงคโปร์ เพื่อตรวจสอบคุณภาพน้ำดิบ
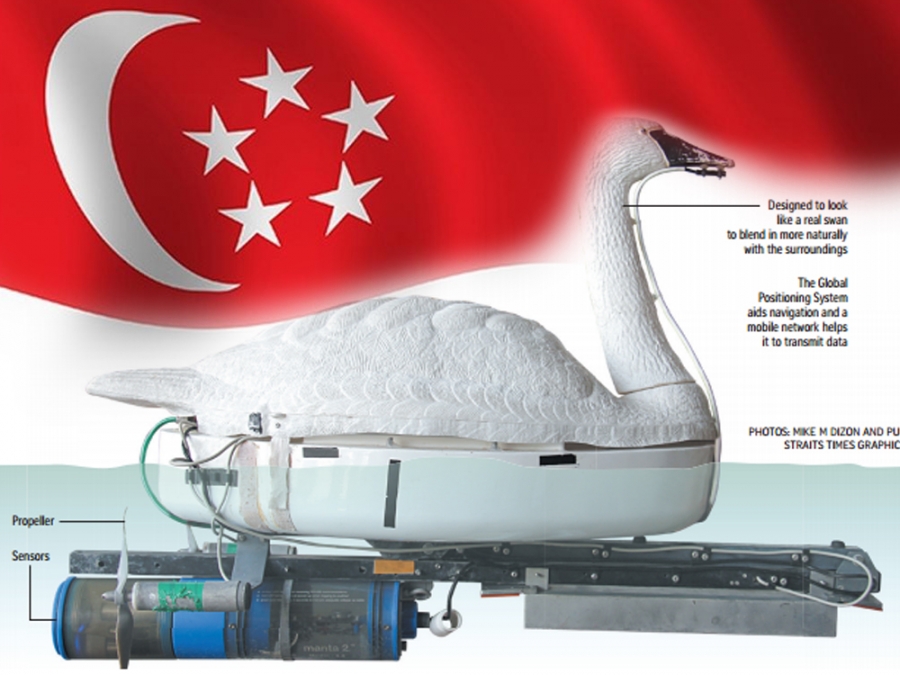
หุ่นยนต์ดังกล่าว มีชื่อเรียกว่า Smart Water Assessment Network (SWAN) ซึ่งใช้เทคโนโลยีสำรวจแหล่งน้ำเพื่อเก็บข้อมูลตามเวลาจริง หุ่นยนต์เหล่านี้ถูกออกแบบมาให้มีรูปลักษณ์เหมือนกับหงส์ตัวจริงที่สุด เพื่อให้กลมกลืนกับธรรมชาติแวดล้อมโดยรอบ
ด้วยการพัฒนาร่วมกันระหว่าง PUB มหาวิทยาลัยแห่งชาติสิงคโปร์ (NUS) และสถาบันค้นคว้าด้านสิ่งแวดล้อม และสถาบันวิทยาศาสตร์ทางทะเลเขตร้อน ทำให้ SWAN ทำการทดสอบเสร็จสิ้นในปี 2559 เพื่อประเมินความสามารถในการเก็บตัวอย่าง และการนำทาง เช่นเดียวกับการใช้พลังงาน
ถือเป็นหนึ่งในการแก้ไขปัญหาด้วยเทคโนโลยีของ PUB ที่นำมาใช้เพื่อเข้าใจในภาวะต่าง ๆ ของแหล่งเก็บน้ำ และพัฒนาคุณภาพน้ำดิบให้ดียิ่งขึ้น
หุ่นยนต์หงส์ดังกล่าวจะนำไปใช้ในแหล่งเก็บน้ำ Marina Punggol Serangoon Pandan และ Kranji ด้าน PUB ระบุว่า ยังมีข้อมูลอื่น ๆ อีกที่จะต้องถูกเก็บจากแหล่งเก็บน้ำใหม่อย่าง Marina Punggol และ Serengoo เพื่อที่จะเข้าใจภาวะของแหล่งเก็บน้ำให้ดีมากยิ่งขึ้น
สำหรับที่ Kranji และ Pandan มีแนวโน้มว่าจะมีการเติบโตของตะไคร่น้ำที่เพิ่มตัวมากยิ่งขึ้นเนื่องจากอากาศแห้ง ดังนั้นทาง PUB จำเป็นต้องจับตาดูคุณภาพน้ำให้ใกล้ชิดมากกว่าเดิม
เมื่อเดือน ก.ค. 2558 ทางสำนักข่าวแชแนลนิวส์เอเชีย ได้เป็นผู้รายงานผลการทดสอบเป็นแห่งแรก หลังจากนั้น ทางกลุ่ม NUS ได้ระบุว่า พวกเขามีแนวความคิดเกี่ยวกับหุ่นยนต์ดังกล่าวมาตั้งแต่ปี 2553 แต่ได้ริเริ่มลงมือทดสอบในปี 2557
ระหว่างการทดสอบ หุ่นยนต์หงส์เหล่านี้จะถูกนำมาใช้เพื่อตรวจสอบตั้งแต่ความแตกต่างในสารประกอบของน้ำบริสุทธิ์ทั้งทางด้านกายภาพและชีวภาพ รวมถึงค่า pH ปริมาณออกซิเจนละลาย ความขุ่นน้ำ และคลอโรฟิลในน้ำ ซึ่งถือเป็นตัวชี้วัดขั้นธรรมดา ที่ใช้ในการกำหนดว่าแหล่งน้ำเหล่านี้มีปัญหาหรือไม่
ในปัจจุบัน เจ้าหน้าที่ผู้ดูแลแหล่งน้ำจำเป็นต้องเผชิญกับความท้าทายทางด้านการเดินทาง เนื่องจากต้องมีการใช้พละกำลังในการเข้าเก็บตัวอย่างจากแหล่งน้ำที่มีปริมาณมาก ซึ่งปรกติแล้วจะใช้เรือ ด้านนักวิจัยกล่าวว่า มันเป็นวิธีการที่ใช้เวลาและกำลังคน รวมถึงช่วงเวลาที่จำกัด เนื่องจากอาจมีกรณีที่เกิดการรั่วไหลของน้ำ หรือการปนเปื้อนมลพิษ
หุ่นยนต์หงส์ทำงานโดยการว่ายวนในบริเวณที่สนใจจะเก็บตัวอย่างน้ำโดยเฉพาะ และจะส่งข้อมูลผ่านสัญญาณไร้สายผ่านระบบคลาวด์บนคอมพิวเตอร์
ด้านนักโปรแกรมจะทำหน้าที่ควบคุมหุ่นยนต์ แต่เป้าหมายในการใช้หุ่นยนต์ดังกล่าวนั้นก็คือการควบคุมให้หุ่นยนต์มีอิสระมากที่สุดเท่าที่จะสามารถทำได้ โดยต้องการเพียงแค่การควบคุมและดูแลขั้นพื้นฐานเท่านั้น ซึ่งสามารถเกิดขึ้นที่ไหนก็ได้เพียงแค่มีการเชื่อมต่ออินเทอร์เน็ต.


































